Chopstick Frame
This initial prototype used
7 chopsticks in a triangle formation. It was extremely heavy and its center of
gravity very far forward. It often nosedived.

{kind=link}
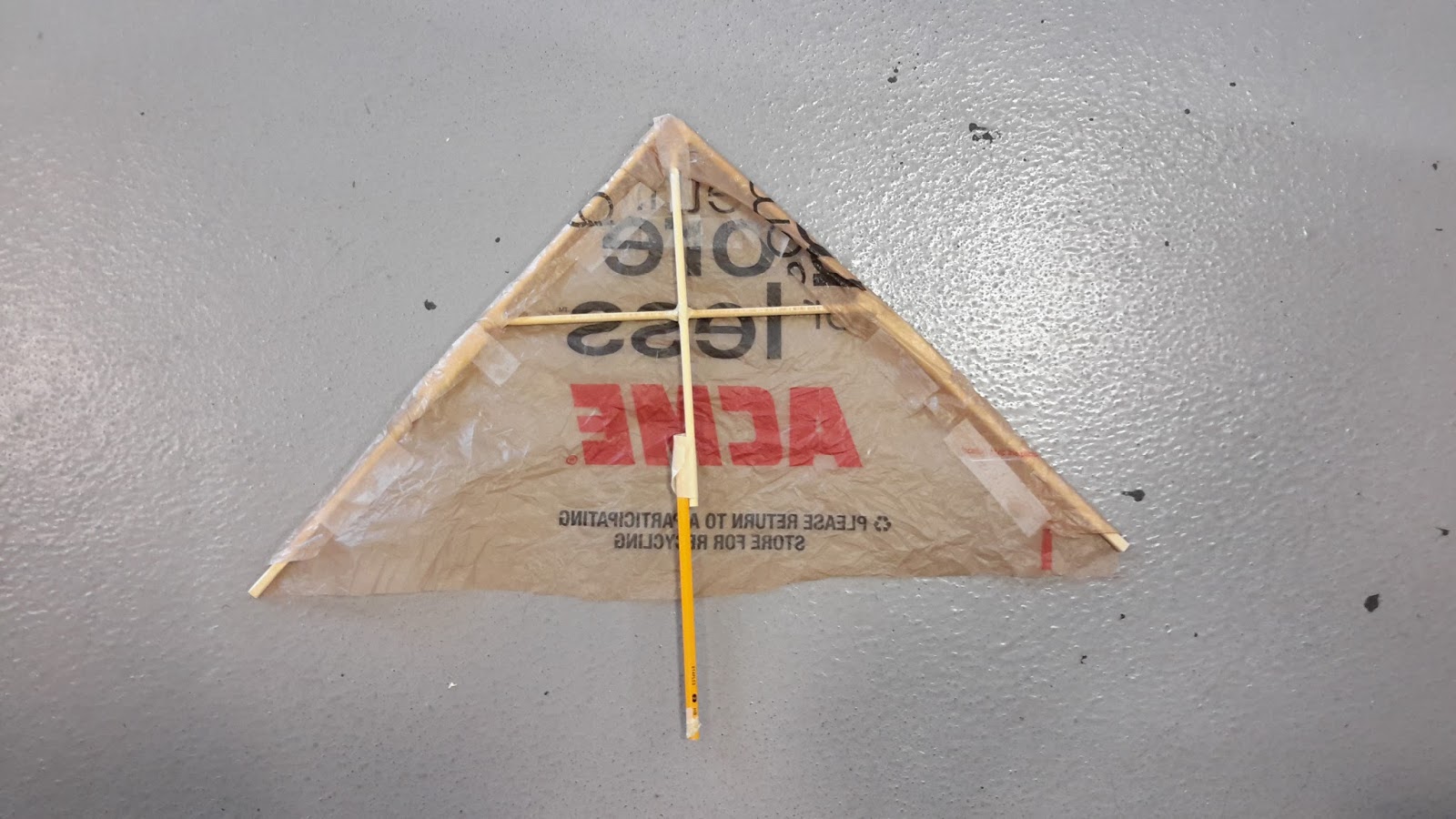
Flat Skewer Frame
This frame utilized thinner skewers again in a triangle formation. Though it significantly decreased the weight of the kite, it was still quite heavy. This prototype glided approximately 17 feet. This was the furthest of all the models. However, it was not easy to control when attached to a line and flown. This prototype tended to flip upside down on its own and never readjust its self.

This frame utilized thinner skewers again in a triangle formation. Though it significantly decreased the weight of the kite, it was still quite heavy. This prototype glided approximately 17 feet. This was the furthest of all the models. However, it was not easy to control when attached to a line and flown. This prototype tended to flip upside down on its own and never readjust its self.

Dihedral Whole Skewer Frame
This prototype used the
same materials as the Flat Skewer Frame. However, the horizontal
cross bar in this prototype was split in half and each side was attached
at an upward angle. This created a dihedral which helped the kite
to readjust itself in the event that it went off balance. Having
fixed the center of gravity, this frame flew similar to the final design.
Though lighter than prior iterations, it was still heavier in comparison to the
final frame.

{kind=link}
Dihedral Halved Skewer Frame
The final kite’s
structure is made by using bamboo skewers positioned in a triangular shape. Two
overlapping skewers were used for each leg of the kite. The longest leg (the
leg across the bottom) is the whole length of two skewers. To decrease the
weight, the skewers were split in half vertically. Cross bars run both
vertically and horizontally through the center of the kite. The horizontal
cross bar was split in half and each side was attached and angle making this
frame a dihedral. A recycled plastic grocery bag was used as the sail. This
kite flew significantly better than the previous prototypes.

{kind=link}
Comments
Post a Comment